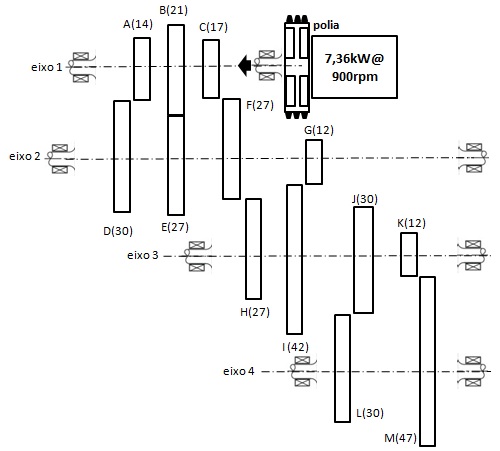
Exercise Chapter 19.4 - Solved - Design Gear 2 - Department of Mechanical Engineeing College FEI Collegiate SBC-Town Campus, Brazil A CLC Hoobing machine pulley at the axle 1 inputs 7,36 kW (as the powerdriven) and spins at a 900 rpm speed. Datasheet : `\eta_{spurgear}` = 97%, `\eta_{bearing\,per\,axle}` = 99% `a'_{12}` = 121 mm `a'_{23}` = 148 mm `a'_{34}` = 180 mm Spur Gear(straight-cut) cement-stabilized iron alloy 15CrNi6, general purpose quality, deem as `Y_E`=1 for your sketch. $$ { z_A \, = \, 14 \,dentes, \, m_A \, = \, 5,5 \, mm, \, z_B \, = \, 21, \, m_B \, = \, 5,0 \,mm, \, z_C \, = \, 17\, \, m_C \, = \, 5,5mm } $$ $$ { z_D \, = \, 30, \, z_E \, = \, 27, \, z_F \, = \, 27, \, z_G \, = \, 12, \, z_H \, = \, 27, \, } $$ $$ { z_I \, = \, 42, \, m_I \, = \, 5,5mm, \, z_J \, = \, 30, \, z_K \, = \, 12, \, m_K \, = \, 6 \, mm, \, z_L \, = \, 30 \, dentes, } $$ $$ { m_L \, = \, 6 \, mm, \, z_M \, = \, 47. } $$
 Resposta para [1] Quais as engrenagens que necessitam de correção e o respectivo tipo (ou zero,ou v-zero, ou v-positivo)
Solved solution for [1] Which are the gear whose profile might need a new correcteness form factor and what kind must be applied (zero, v-zero ou v-positivo)
Resposta para [1] Quais as engrenagens que necessitam de correção e o respectivo tipo (ou zero,ou v-zero, ou v-positivo)
Solved solution for [1] Which are the gear whose profile might need a new correcteness form factor and what kind must be applied (zero, v-zero ou v-positivo)
Possíveis engastes The try outs might satisfies $$ { eixo_1 / eixo_2 \, : \text{engrenagem}_A / engr_D, \;\; engr_B / engr_E, \;\; engr_C / engr_F } $$ $$ { axle_1 / axle_2 \, : \text{gear}_A / engr_D, \;\; engr_B / engr_E, \;\; engr_C / engr_F } $$
$$ { \\eixo_2 / eixo_3 \, : engr_F / engr_H, \;\; engr_G / engr_I } $$
$$ { \\eixo_3 / eixo_4 \, : engr_J / engr_L, \;\; engr_K / engr_M } $$
Engrenamento zero ou sem correção : página 97 Zero Gear-Coupling drive-system or also know as unmodified (no-modification requires) Zero ペア歯車紡転駆動システム(Zero haguruma bouten kudou system)$$ { a \, = \, a'; \, z_1 \, \ge \, z_{min} \, \Rightarrow \, x_1 \, = \, x_2 \, = \, 0 } $$
Engrenamento V-zero com correção (roda dentada A e B) : página 100 V-Zero simple gear-coupling(?) drive-system correctable V-Zero teeth (cogwheel A and B) (in my college we coined the term correction) : look up on page 100. Zero-V 種類 訂正 Vーゼロ ペア歯車紡転駆動システム(Zero haguruma bouten kudou system)$$ { \\V-Zero \, : \, a=a' \, ; \, z_1 \, \ge \, z_{min} \, esta \, condição \, é \, suficiente \, sendo \, ainda \, : \\V-Zero \, : \, a=a' \, ; \, z_1 \, \ge \, z_{min} \, this \, condition \, is \, enough \, moreover \, we \, head \, up \, to \, : \\Vーゼロ \, : \, a=a' \, ; \, z_1 \, \ge \, z_{min} \, この場合はだけで足りるです。この場合、それだけで十分です。情報を追加しました。 } $$
$$ { \\(z_1+z_2) \, \ge \, 2.z_{min} \, \\V-Zero \, x_1 \, = \, -\, x_2 } $$
Engrenamento V : Simple gear pair-coupling V drive-system : V ペア歯車紡転駆動システム(V haguruma bouten kudou system)$$ { a \, \ne \, a'; \, (z_1 \, + \, z_2) \, \lt \, 2.z_{min} \, \Rightarrow \, x_1 \, = \, -x_2 \, = \, 0 \begin{cases} x_1, & \text{vide ábaco da página 118 ou 119, \\ look \, up \, for \, diagram \, datasheet \, on \, pages \, 118 \, and \, 119} \\ x_2 \end{cases} } $$
$$ { a'_{12} \, , \, comparando \, : comparing \, , \, , \, 比較 \,では \,(hikaku \, deha) \begin{cases} a_{AD} \, = \, \cfrac{5,5(14 \, + \, 30)}{2} \, = \, 121; \; a \, = a' \\ a_{BE} \, = \, \cfrac{5,0(21 \, + \, 27)}{2} \, = \, 120; \; a \, \lt \, a' \\ a_{CF} \, = \, \, \cfrac{5,5(17 \, + \, 27)}{2} \, = \, 121; \; a \, = \, a' \end{cases} } $$
admitindo `z_{min}` = 17 (com `\alpha` = 20°) let's consider `z_{min}` = 17 (with `\alpha` = 20°) 検討してください(kentou shite kudasai)、 `z_{min}` = 17 (`\alpha`は = 20° です)$$ { Admintindo \, z_{minimo} \, = \, 17 \, (com \; \alpha \, = \, 20^o \, graus) \\ presuming \, z_{minimo} \, = \, 17 \, (based off \; \alpha \, = \, 20^o \, degree) \\ もしの場合は。(moushi no baai ha) \, z_{minimo} \, = \, 17 \, (基づいて(motozuite) \; \alpha \, = \, 20^o \, 角度(kakudo)) } $$
$$ { Par \, AD \, : \, Tipo \, de \, correção \, z_1 \, \lt \, z_{minimo}\, , \, logo \, V-zero // AD-Pair \, : \, Correctioness \, of \, Type \, z_1 \, \lt \, z_{minimun}\, , \, therefore \, it \, end \, up \, onto \, V-zero // AD-Pair \, : \, 訂正 \, の \, 種類 \, は \, z_1 \, \lt \, z_{最小}\, , \, それから \, に \, 正解 \, は \, V-zero \, です。 } $$
$$ { Par \, BE \, : \, Tipo \, de \, correção \, a \, \lt \, a' \, \Rightarrow \, 120 \, \lt \, 121 , \, logo \, V-positivo \\ BE-Pair \, : \, Correctioness \, of \, Type \, a \, \lt \, a' \, \Rightarrow \, 120 \, \lt \, 121 , \, therefore \, it \, outcomes \, in \, \, V-positivo } $$
$$ { Par \, CF \, : \, Não \, necessita \, de \, correção, z_1 \, \ge \, z_{minimo} Pair \, CF \, : \, Does not \, requires \, correctioness \, z_1 \, \ge \, z_{minimum} } $$
$$ { a'_{23} \, = \, 148,5 \, comparando\; : \begin{cases} a_{FH} & \, = \, \cfrac{5,5(27 \, + \, 27)}{2} \, = \, 148,5 \, \implies a \, = a' \\ a_{GI} & \, = \, \cfrac{5,5(12 \, + \, 42)}{2} \, = \, 148,5 \, \implies a \, = \, a' \end{cases} \\ a'_{23} \, = \, 148,5 \, comparing\; : \begin{cases} a_{FH} & \, = \, \cfrac{5,5(27 \, + \, 27)}{2} \, = \, 148,5 \, \implies a \, = a' \\ a_{GI} & \, = \, \cfrac{5,5(12 \, + \, 42)}{2} \, = \, 148,5 \, \implies a \, = \, a' \end{cases} } $$
$$ { Par \, FH \, não \, necessita \, de \, correção, \, z_1 \, \ge \, z_{min} \, admitido \, z_{min}=17; \, 27 \, \ge \, 17 \\Since \, we \, made \, the \, premise \, that \, z_{min}=17; \, 27 \, \ge \, 17 therefore \, the \, Pair \, FH \, doesn't \, requires \, correction } $$
$$ { Par \, GI \, : \, Tipo \, de \, correção \, z_1 \, \lt \, z_{min}, \, Logo \, V-Zero \\ GI \, pair \, : \, Correctioness \, of \, Type \, z_1 \, \lt \, z_{min}, \, therefore \, V-Zero } $$
$$ { a'_{34} \, = \, 180, \,comparando-os\; \, comparing \, them \, out\, : \begin{cases} a_{JL} & \, = \, \cfrac{6(30 \, + \, 30)}{2} \, = \, 180 \, \implies a \, = a' \\ a_{KM} & \, = \, \cfrac{6(12 \, + \, 47)}{2} \, = \, 177; \, \implies a \, \lt \, a' \end{cases} } $$
$$ { Par \, JL \, não \, necessita \, de \, correção, \, z_1 \, \ge \, z_{min} \, admitido \, z_{min}=17; \, 30 \, \ge \, 17 \\Since \, we \, made \, the \, premise \, that \, z_{min}=17; \, 30 \, \ge \, 17 \, JL-pair \, doesn't \; requires \, correctioness } $$
$$ { Par \, KM \, : \, Tipo \, de \, correção \, a \, \lt \, a', \, Logo \, V-Positivo \\KM-pair \, : as \, it \,\, end \,\, up \,\, on \,\, a \, \lt \, a', \, threfore \, Positive-V \, classification } $$
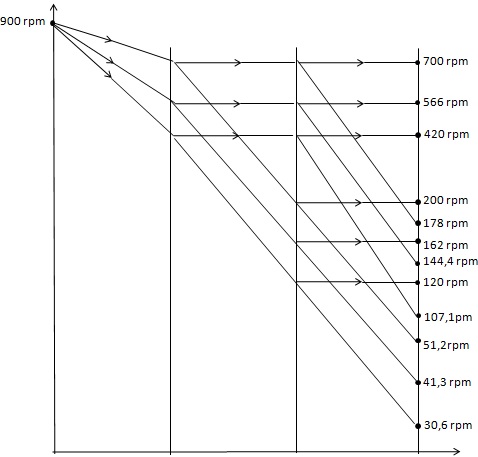
Resposta para (exercício resolvido)[2] Rotações no eixo de saida 4. The answer to the (solved solution)[2ᶮᵈ] rotations(?)/revolutions(?) which leaving output shaft 4.$$ { n_{eixo1} \, = \, 900 \, rpm; \, \frac{z_2}{z_1} \, = \, \frac{n_1}{n_2} \\ n_{axle1} \, = \, 900 \, rpm; \, \frac{z_2}{z_1} \, = \, \frac{n_1}{n_2} } $$
$$ { \frac{z_D}{z_A} \, = \, \frac{n_A}{n_D} \, = \, \frac{30 \,dentes}{14 \,dentes} \, = \, \frac{900rpm}{n_D} \, \Rightarrow \, n_D \, = \, 420 \, rpm \frac{z_D}{z_A} \, = \, \frac{n_A}{n_D} \, = \, \frac{30 \,teeth}{14 \,teeth} \, = \, \frac{900rpm}{n_D} \, \Rightarrow \, n_D \, = \, 420 \, rpm } $$
$$ { Rotação \, de \, saída \, no \, eixo \, 2 \, : \\ Revolutions \,\, which \,\, outputs \,\, from \,\, axle \,\, 2 : \\ n_AD \, = \, 420 \, rpm \\ \frac{27 \, dentes}{21 \, dentes} \, = \, \frac{900 \, rpm}{n_BE} \, \Rightarrow \, n_BE \, = \, 700 \, rpm \, e \, ainda \, temos \\ \frac{27 \, teeth}{21 \, teeth} \, = \, \frac{900 \, rpm}{n_BE} \, \Rightarrow \, n_BE \, = \, 700 \, rpm \, moreover \, it \, still \, has \\ \frac{27 \,dentes}{17 \,dentes} \, = \, \frac{900 \, rpm}{n_CF} \, \Rightarrow \, n_CF \, = \, 566 \, rpm \\ \frac{27 \,teeth}{17 \,teeth} \, = \, \frac{900 \, rpm}{n_CF} \, \Rightarrow \, n_CF \, = \, 566 \, rpm } $$
$$ { Rotação \, de \, saída \, no \, eixo \, 3 \, : \\Output \, revolutions \, on \, the \, axle \, 3 \, : \\ \frac{27 \, dentes}{27 \, dentes} \, = \, \frac{420 \, rpm}{n_FH} \, \Rightarrow \, n_FH \, = \, 420 \, rpm \\ \frac{27 \, dentes}{27 \, dentes} \, = \, \frac{700 \, rpm}{n_FH} \, \Rightarrow \, n_FH \, = \, 700 \, rpm \\ \frac{27 \, dentes}{27 \, dentes} \, = \, \frac{566 \, rpm}{n_FH} \, \Rightarrow \, n_FH \, = \, 560 \, rpm \\ rotações GI \\ \frac{42 \, dentes}{12 \, dentes} \, = \, \frac{420 \, rpm}{n_GI} \, \Rightarrow \, n_GI \, = \, 120 \, rpm \\ \frac{42 \, dentes}{12 \, dentes} \, = \, \frac{700 \, rpm}{n_GI} \, \Rightarrow \, n_GI \, = \, 200 \, rpm \\ \frac{42 \, dentes}{12 \, dentes} \, = \, \frac{566 \, rpm}{n_GI} \, \Rightarrow \, n_GI \, = \, 161 \, rpm } $$
$$ { Rotação \, de \, saída FINAL \, no \, eixo \, 4 \, com \, base a, nas rotações \, de 1, \, 2\, e \,3 : \\Final \, output \, revolutions \, which \, leaves \, out \, from \, axle \, 4 \, based \, off \, previous \, axles \, 1, \, 2\, and \,3 : \\ \frac{30 \, dentes}{30 \, dentes} \, = \, \frac{420 \, rpm}{n_JL} \, \Rightarrow \, n_JL \, = \, 420 \, rpm \\ \frac{30 \, dentes}{30 \, dentes} \, = \, \frac{700 \, rpm}{n_JL} \, \Rightarrow \, n_JL \, = \, 700 \, rpm \\ \frac{30 \, dentes}{30 \, dentes} \, = \, \frac{566 \, rpm}{n_JL} \, \Rightarrow \, n_JL \, = \, 560 \, rpm \\ rotações KM \\ \frac{47 \, dentes}{12 \, dentes} \, = \, \frac{420 \, rpm}{n_KM} \, \Rightarrow \, n_KM \, = \, 107,1 \, rpm \\ \frac{47 \, dentes}{12 \, dentes} \, = \, \frac{700 \, rpm}{n_KM} \, \Rightarrow \, n_KM \, = \, 178,6 \, rpm \\ \frac{47 \, dentes}{12 \, dentes} \, = \, \frac{566 \, rpm}{n_KM} \, \Rightarrow \, n_KM \, = \, 144,4 \, rpm } $$
Resposta final das rotações de saída no eixo 4 - resolvido : Final answer for the output revolutions at axle 4 - solved solution : 107,1 rpm, 178,6 rpm, 144,4 rpm, 420 rpm, 560 rpm e 700 rpm. 6 possíveis velocidades de saída. 107,1 rpm, 178,6 rpm, 144,4 rpm, 420 rpm, 560 rpm e 700 rpm. it end up on 6 possibles output speeds.
Resposta para [3] Diâmetro onde a espessura do dente da roda L se anula. Answer for [3] Diameter where the L-cogwheel tooth's thickness turns into null.
$$ { \\ De \, forma \, genérica \, : \\In \, a \, generic \, way ; \\ s_{xj}=d_{xj}\Bigr[ \frac{1}{z_j}( \frac{\pi}{2} \, + \, 2.x_{j} tan\alpha ) + ev\alpha \, + \, - \, ev \, \alpha_{xj} \Bigr] } $$
$$ { \\ No \, exercício \, para \, engrenagem \, L \, : \\for \, this \, exercise \, this \, cogwheel \, L \, : \\ s_{L}=d_{L}\Bigr[ \frac{1}{z_L}( \frac{\pi}{2}+2.x_{L} tan\alpha ) + ev\alpha \, + \, - \, ev \, \alpha_{xj} \Bigr] } $$
$$ { \\ s_{L} \, = \, zero \\a = \frac{m_L}{2}(z_J + z_sL) = \frac{6}{2}(30 + 30) = 3(60) = 180\; mm \\a=a' pois a'_{3\,e\,4} \; é \; 180\; mm \; (dado\; no\; exercício) \\a=a' because a'_{3\,e\,4} \; it \, is \; 180\; mm \; (based \, off\, \, datasheet \, information) \\ Sabendo \, que \ o \, par \, JL \, é z_L \, \ge \, z_{min} \, não \, necessita \, de \, correção \, e \, portanto \, x_L \, = \, 0 \, (zero) \\ Be \, knowing \, that \ the \, JL \, pair \, it \, is z_L \, \ge \, z_{min} \, it \, doesn't \, requires \, correctioness \, and \, therefore \, x_L \, = \, 0 \, (zero) \\ s_{L}=d_{xL}\Bigr[ \frac{1}{z_L}( \frac{\pi}{2}+2.x_{L} tan\alpha ) + ev\alpha \, - \, ev \, \alpha_{xj} \Bigr] \\ zero =d_{xL}\Bigr[ \frac{1}{30}( \frac{\pi}{2}+2(0) tan(20,0°) ) + ev(20,0°) - \, ev \, \alpha_{x1} \Bigr] \\ 0 =d_{xL}\Bigr[ \frac{1}{30}( 1,57 + 0 ) + 0,0149044 - \, ev \, \alpha_{x1} \Bigr] \\ 0 =d_{xL}\Bigr[ \frac{1,57}{30} + 0,0149044 - \, ev \, \alpha_{x1} \Bigr] \\ 0 = d_{xL}( 0,052 + 0,0149044 - \, ev \, \alpha_{x1} ) = d_{xL}( 0,0672377 - \, ev \, \alpha_{x1} ) \\desenvolve \; d_{xL} \; fica \; : \; 0 = d_{xL}0,0672377 - d_{xL}.ev \, \alpha_{x1} \\develop it on \; d_{xL} \; turn out onto \; : \; 0 = d_{xL}0,0672377 - d_{xL}.ev \, \alpha_{x1} \\d_{xL}.ev \, \alpha_{x1} = 0,0672377d_{xL} \\ev \, \alpha_{x1} = 0,0672377 . \frac{ d_{xL} } { d_{xL} } \\ev \, \alpha_{x1} = 0,0672377 . \frac{ \cancel{d_{xL}} } { \cancel{d_{xL}} } } $$
Função envolvente do ângulo de pressão onde a espessura zera é de 0,0672377 envolvent function of 0,0672377's pressure angle is where the thickness turns out into a null
$${ \\página \; 98\; : \; eV 32,1° = 0,0670481 mais próximo de 0,0672377 \\page \; 98\; : \; eV 32,1° = 0,0670481 the closest value of 0,0672377 }$$
$${ \\página \; 100\; : d_{b1} = z_1.m.cos \alpha \\page \; 100\; : d_{b1} = z_1.m.cos \alpha \\d_{b1} = z_L.m.cos \alpha \\d_{b1} = 30(6)cos 20,0° \\d_{b1} = 30(6)0,93 \\d_{b1} = 169,14 }$$
$${ \\cos \alpha_x = \frac{ d_B }{ d_x } \Rightarrow d_x = \frac{ d_B }{ cos \alpha_x } \\d_x = \frac{ 169,14 }{ cos( 32,1° ) } \\d_x = \frac{ 169,14 }{ 0,847 } \\d_x = 199,66 \; mm }$$
Resposta para [4] Largura b dos dentes do par de engrenagem K e engrenagem M. Answer [4] design B length for K and M cogwheels.$$ { z_K \, = \, 12, \, m_K \, = \, m_M \, = \, 6 \, mm, \, e \, z_M \, = \, 47 } $$
Engrenagem K é pinhão (engrenagem menor) e engrenagem M é a engrenagem coroa (que é a engrenagem maior) Cogwheel K is the smaller-size and M gear is whose large cogwheel.$$ { \\ Equação \, do \, critério\, flexão \, no \, pé \, do \, dente \, (Lewis) \\ Lewis-Equation \, criteria \, \, based \, off \, flexion \,\, on \,\, tooth \,\, bottom-base \,\, tooth. (Lewis) \\ \sigma_{max} \, = \, \frac{F_{tj}}{b.m}.Y_{Fj}.Y_{serviço}.Y_{\epsilon}.Y_{velocidade} \, \le \, \frac{\sigma_{flexão\,adm\,j}}{k_f} } $$
$$ { \\ equação \, de \, desgaste \, (critério \, de \, Hertz) \\ Hertz-Equation \, based \, off \, mechanical \, wear \, criteria \\b.(d_1')^2 \, \ge \, \frac{19.10^6.0,7.E_c.P_j.(i \, - \, 1)}{ sen(2.\alpha').n_1.(\sigma_{H\,admissível \, j })^2.i.Y_{serviço}.Y_{velocidade} } \\ e\, só\, se\, aplica\, para\, o\, material\, menos\, resistente \\only \, applies \,\, for \,\, the \,\, lowerst \,\, mechanical \,\, strenghness \,\, material \\ unidades \, | \, units \, : \\ Potência \, (P_j) \, : \, [kW] \, kilo \, Watt \\ Power input \, (P_j) \, : \, [kW] \, kilo \, Watt \\ Módulo \, de \, elasticidade \, equivalente \, (E_c) \, : \, [MPa] \, Mega \, Pascal \\ Elastic \, modulus \, equivalence \, of \, materials \, (formula \, among \, out \, of \, E1 \, and \, E2 \, properties) \\ largura \, dos \, dentes \, (b) \, : \, [mm] \, milimetro \\ b \, tooth \, width \, : \, [mm] \, milimeter \\ Diâmetro \, de \, trabalho \, (d'_1) \, : \, [mm] \\ Contact-interface \, Diameter \,\, (d'_1) \, : \, [mm] \\ Tensão \, de \, esmagamento \, admissível \, (\sigma_{Hadm}) \, ; \, [MPa] \, Mega \, Pascal \\ Smashing's \, tension \, admissible \, tension \, (\sigma_{Hadm}) \, ; \, [MPa] \, Mega \, Pascal \\ Rotação \, do \, pinhão \, (n_1) \, ; \, [rpm] \, rotação \, por \, minuto \\ Speed \, comes \, out \, from \, smaller \, cogwheel \, (n_1) \, ; \, [rpm] \, revolutions \, per \, minute } $$
ECDR material metálico aço para cementação 15CrNi6 Spur CogWheel Gear metallic material Cement-Steel 15CrNi6$$ { \\ E_c \, = \, \frac{2.E_1.E_2}{E_1 \, + \, E_2} \, = \, 210.000 \, MPa \\ módulo de elasticidade equivalente da roda E1 and E2. \\ equivalent elastic modulus of E1 e E2 cogwheels. } $$
Fator de forma `Y_F` | Form Factor `Y_F` precisa conhecer o tipo de engrenamento e correção do perfil `x_1` e `x_2` como a=177 e a'= 180, logo a`\ne`a' 177 `\ne` 180, logo it is need to be known what type of gear-coupling drive-system and what type of correctioness profile which `x_1` e `x_2` as long as a=177 and a'= 180, therefore a`\ne`a' 177 `\ne` 180, therefore
$$ { \\ \begin{cases} V\;positivo \;|\; positive\; quando\; | \:when \; a' \gt a \\V\;negativo \; | \; negative \; quando\; \ \; when \; a' \lt a \end{cases} } $$
logo engrenamento é do tipo V-Positivo, necessita de correção therefore the gear-coupling end up on Positive-V type of gear-coupling drive-system, that it need to applies correctness. considerando `\alpha` usual `20^°` based off `\alpha` usual `20^°` $$ { \\ \frac{a'}{a} = \frac{cos \alpha}{cos \alpha'} \Rightarrow cos \alpha' = \frac{a}{a'}.cos \alpha \\ \alpha' = arc\; cos \Bigr( \frac{a}{a'}.cos\alpha \Bigr)= arc cos \Bigr( \frac{177}{180}.cos\,20° \Bigr) \\ \alpha' = arc\; cos \Bigr( 0,983.0,94 \Bigr) = arc\; cos\; (0,924) = 22,4° } $$
$${ \\ eV\; \alpha \Rightarrow eV 20,0° = 0,0149044 \; (página\; 98) \\ eV\; \alpha' \Rightarrow eV 22,4° = 0,0212165 \; (página\; 98) }$$
pegar sempre 7 dígitos (casas decimais) localizados (a+a=)à direita da vírgula always grab 7 numbers-digits at the right side of comma for the formula (never round up number, the accuracy matters)$${ \\ eV\; \alpha' = B.tg\alpha + eV\, \alpha \Rightarrow eV\; 22,4° = B.tg(20,0°) + eV\, (20,0°) \\ 0,0212165 = B.0,363970 + 0,0149044 \\ B = \frac{0,0212165 - 0,0149044}{0,363970} \\ B = \frac{0,0063121}{0,363970} \Rightarrow B \,= \, 0,0173423 }$$
$${ \\ (x_1 + x_2) = \frac{B\, (z_1 + z_M)}{2} \Rightarrow (x_1 + x_2) = \frac{B\, (z_K + z_M)}{2} \\ (x_1 + x_2) = \frac{0,0173423\, (12 + 47)}{2} \Rightarrow (x_1 + x_2) = \frac{0,0173423\, (59)}{2} \\ (x_1 + x_2) = \frac{1,0231957}{2} = 0,51 \\ }$$
$${ \\ z_{medio} = \frac{z_1 + z_2}{2} = \\ z_{medio} = \frac{z_K + z_M}{2} = \\ z_{medio} = \frac{12 + 47}{2} = \frac{59}{2} \\ z_{medio} = 29,5 }$$
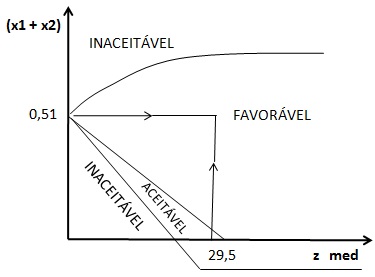 página 117 : (`x_1` + `x_2`) engrenamento favorável
quando cair na zona de engrenamento inaceitável
não continuar (cálculos) e justificar que o tipo de engrenamento é
inaceitável, ou seja inviável.
page 117 : (`x_1` + `x_2`) gear-coupling drive-system whose transmission works favorably (pan out well).
however when it point out at the unacceptably gear-coupling drive-system zone
stop out and don't keep on (over calculation) and end the answering replying by justification that
it is unacceptable or it has no feasability.
página 117 : (`x_1` + `x_2`) engrenamento favorável
quando cair na zona de engrenamento inaceitável
não continuar (cálculos) e justificar que o tipo de engrenamento é
inaceitável, ou seja inviável.
page 117 : (`x_1` + `x_2`) gear-coupling drive-system whose transmission works favorably (pan out well).
however when it point out at the unacceptably gear-coupling drive-system zone
stop out and don't keep on (over calculation) and end the answering replying by justification that
it is unacceptable or it has no feasability.
$$ { \\ \begin{cases} pinhão\; motriz\; consultar\; gráfico\; página\; 118 | when \; the \; smaller \; cog \; is \; driving force \; look \; up \; at \; page ; 118 \\coroao\; motriz\; consultar\; gráfico\; página\; 119 | when \; the \; large \; cog \; is \; driving force \; look \; up \; at \; page ; 119 \end{cases} } $$
valores de `x_1` e `x_2` no eixo horizontal marcar os valores de `z_1`=`z_K`=12 e `z_2`=`z_M`=47. Com auxílio de uma regua encontrar a metade do segmento entre `z_1` e `z_2`
$${ \\ sabemos\; que\; (x_1 + x_2) = 0,51 \\ \frac{x_1 + x_2}{2} = \frac{0,51}{2} \cong 0,25 }$$
cruzar o ponto da metade do segmento marcado com auxílio de uma régua com o valor na vertical de 0,25 com a intersepção da reta inclinada encontra os valores de `x_1` e `x_2` conforme figura
to find out the values for `x_1` e `x_2` please check out by following this instructions ; on the horizontal axle mark `z_1`=`z_K`=12 and `z_2`=`z_M`=47 (them) out then use a ruler to help you find the halfway beteween`z_1` and `z_2`
$${ \\ we \; know \; that \; (x_1 + x_2) = 0,51 \\ \frac{x_1 + x_2}{2} = \frac{0,51}{2} \cong 0,25 }$$
cross the halfway point of the segment line made by the ruler that helped you to and now mark com o valor na vertical de 0,25 com a intersepção da reta inclinada encontra os valores de `x_1` e `x_2` according to the image (to help you grasp in)
$${ \\ a' \gt a\; engrenamento\; positivo\; com\; x_1 = x_K = 0,36 \\e\; x_2 = x_M = 0,15 }$$
fator de forma, conhecidos `x_1` = 0,36 e `x_2` = 0,15 na página 120 entre as curvas C e D e na horizontal em `z_1`=12 `\Rightarrow` `Y_{F1} \cong` 3,7 entre as curvas D e E e na horizontal em `z_2`=47 `\Rightarrow` `Y_{F2} \cong` 2,5
Fator do grau de recobrimento `Y_{\epsilon}`, conhecidos `x_1` = 0,36 e `x_2` = 0,15
$${ \\ cos \alpha_{a1} = \underbrace{ cos \Bigr[ \frac{d_{b1}}{d_{a1}} \Bigr] }_{\text{quando temos o módulo}} = \underbrace{ \frac{z_1.cos \alpha . cos \alpha'}{ (z_1 + z_2)cos \alpha - z_2.cos \alpha' + 2cos \alpha' (1 - x_2) } }_{\text{quando não temos o módulo}} \\ \\ cos \alpha_{a1} = \frac{z_1.cos \alpha . cos \alpha'}{ (z_1 + z_2)cos \alpha - z_2.cos \alpha' + 2cos \alpha' (1 - x_2) } \\ cos \alpha_{a1} = \frac{12.cos 20° . cos 22,4°}{ (12 + 47)cos 20° - 47.cos 22,4° + 2cos 22,4° (1 - 0,15) } \\ cos \alpha_{a1} = \frac{12 (0,939) 0,924}{ (59)0,939 - 47.0,924 + 2(0,924)(0,85) } \\ cos \alpha_{a1} = \frac{10,42}{ 13,56 } = 0,768 \\ cos \alpha_{a1} = 0,768 \\ \alpha_{a1} = arc \; cos\, (0,768) \\ \alpha_{a1} = 39,82° }$$
$${ \\ cos \alpha_{a2} = \underbrace{ cos \Bigr[ \frac{d_{b2}}{d_{a2}} \Bigr] }_{\text{quando temos o módulo}} = \underbrace{ \frac{z_2.cos \alpha . cos \alpha'}{ (z_1 + z_2)cos \alpha - z_1.cos \alpha' + 2cos \alpha' (1 - x_1) } }_{\text{quando não temos o módulo}} \\ \\ cos \alpha_{a2} = \frac{z_2.cos \alpha . cos \alpha'}{ (z_1 + z_2)cos \alpha - z_1.cos \alpha' + 2cos \alpha' (1 - x_1) } \\ cos \alpha_{a2} = \frac{47.cos 20° . cos 22,4°}{ (12 + 47)cos 20° - 12.cos 22,4° + 2.cos 22,4° (1 - 0,36) } \\ cos \alpha_{a2} = \frac{47 (0,939) 0,924}{ (59)0,939 - 12.0,924 + 2(0,924)(0,64) } \\ cos \alpha_{a2} = \frac{40,77}{ 55,4 - 11,08 + 1,18 } = \frac{40,77}{ 56,58 - 11,08 } = \frac{40,83}{45,5} \\ cos \alpha_{a2} = \frac{40,77}{ 56,58 - 11,08 } = \frac{40,83}{45,5} \\ cos \alpha_{a2} = \frac{40,83}{45,5} = 0,879 \\ \alpha_{a1} = arc \; cos\, (0,879) \\ \alpha_{a1} = 28,47° }$$
conhecendo o ângulo de pressão do pinhão (`z_K`=12) `\alpha_{a1}`=39,82° da coroa (`z_M`=47) `\alpha_{a2}`=28,47° e do ângulo de pressão real `\alpha'`=22,4° calcular o grau de recobrimento `\epsilon`
$${ \\ \epsilon = \frac{1}{2\pi}[ z_1(tan \alpha_{a1} - tan \alpha') + z_2(tan \alpha_{a2} - tan \alpha') ] \\ \epsilon = \frac{1}{2\pi}[ 12(tan (39,82°) - tan (22,4°) ) + 47(tan (28,47°) - tan (22,4°) ) ] \\ \epsilon = \frac{1}{2\pi}[ 12( 0,834 - 0,412 ) + 47(0,542 - 0,412 ) ] \\ \epsilon = \frac{1}{2\pi}[ 12( 0,422 ) + 47( 0,13 ) ] = \frac{1}{2\pi}[ 5,06 + 6,11 ] \\ \epsilon = \frac{11,17}{2.\pi} = \frac{11,17}{6,28} = 1,77}{ }$$
recobre 1 dente inteiro e mais 77%calculo do fator de recobrimento `Y_\epsilon` $${ \\Y_\epsilon = 0,25 + \frac{0,75}{\epsilon} \\Y_\epsilon = 0,25 + \frac{0,75}{1,77} \\Y_\epsilon = 0,25 + 0,42 = 0,67 }$$
porém foi fornecido no enunciado considerar `Y_\epsilon`=1Fator de velocidade (carga dinãmica) `Y_v` dado que é uma engrenagem de boa qualidade comercial ver tabela VI precisão do dente : a* = 6
$${ \\lembrando \; d'_1 = z.m.\frac{a'}{a} = 12(6)\frac{180}{177} \\d'_1 = 12(6)\frac{180}{177}= 73,22 \; mm \\d'_1 = 73,22 \; mm\; = \; 73,22.10^-3 \; m }$$
rotação que chega no pinhão :$${ \\n_1 = n_K \\ n_1 = \frac{ n_{eixo\,1} }{ i_{max\, eixo\, 1\, e \, 2} . i_{max\, eixo\, 2\, e \, 3}} = \cfrac{ n_{eixo\,1} }{ \cfrac{z_D}{z_A} . \cfrac{z_I}{z_G} } }$$
faz o cálculo considerando o engrenamento de maior relação i (será o maior esforço solicitado, maior transmissão de potência para que seja projetada corretamente - Lewis e Hertz - largura b)
eixo 1 e eixo 2$${ \\ \frac{z_D}{z_A} = \frac{30}{14} = 2,14 \; (maior \; i_{max} \; eixo \; 1 \; e \; 2) \\ \frac{z_E}{z_B} = \frac{27}{21} = 1,28 \\ \frac{z_D}{z_A} = \frac{27}{17} = 1,58 }$$
eixo 2 e eixo 3$${ \\ \frac{z_H}{z_F} = \frac{27}{27} = 1,0 \\ \frac{z_I}{z_G} = \frac{42}{12} = 3,5 \; (maior \; i_{max} \; eixo \; 2 \; e \; 3) }$$
$${ \\n_1 = n_K \\ n_1 = \frac{ n_{eixo\,1} }{ i_{max\, eixo\, 1\, e \, 2} . i_{max\, eixo\, 2\, e \, 3}} = \frac{ n_{eixo\,1} }{ \frac{z_D}{z_A} . \frac{z_I}{z_G} } \\ n_1 = \cfrac{ 900\, rpm }{ \cfrac{30}{14} . \cfrac{42}{12} } \\ n_1 = \frac{ 900\, rpm }{ 2,14 . 3,5 } = \frac{ 900\, rpm }{ 7,49 } \\ n_1 = \frac{ 900\, rpm }{ 7,49 } = 120,16\; rpm \cong 120\; rpm }$$
$${ \\v = \pi.d'_1.n_1 = \pi. 73,22. 10^-3\; m . 120 \frac{rev}{min}.\frac{1min}{60s} = \pi(73,22. 10^-3)2 \\v = = \pi(73,22 \; . \; 10^{-3})2 = 0,46\; m/s }$$
$${ \\F_v = \frac{a* + \sqrt{v} }{a*} = \frac{6 + \sqrt{0,46} }{6} = \\F_v = \frac{6 + \sqrt{0,46} }{6} = \frac{6+0,67}{6} = 1,11 }$$
fator de velocidade `Y_v`é de 1,11 fator de serviço sendo motor elétrico de uma máquina operatriz que é uma máquina ferramenta$$ { \\ F_{tangencial} \, : \\ P = F_t . v \; \Rightarrow F_t = \frac{Pot}{v}; \; \\v= \omega_2. \frac{d'_K}{2} \; \;\;\;\; (d'_K \; funcionamento) \\F_t = \cfrac{Pot}{ \omega_2. \cfrac{d'_K}{2} }; \; } $$
$$ { \\a = m_K \frac{ (z_K + z_M) }{2} \Rightarrow a = \frac{6}{2}.(12 + 47) \\a = \frac{ 6(59) }{2} = \frac{354}{2} = 177\; mm \\ \\a'_{KM} = a'_{eixo\, 3 \, e \,4} = 180\, mm\; (foi\; dado) \\ \frac{d'_K}{d_K} = \frac{a'_K}{a_K} \Rightarrow d'_K = d_K . \frac{a'_K}{a_K} \\d'_K = d_K . \frac{a'_K}{a_K} = z_K.m_K. \frac{a'_K}{a_K} \\d'_K = 12 \,(6) \, \frac{180}{177} = 72(1,017) = 73,22\; mm } $$
$$ { \\velocidade\; v: \\v = \pi (73,22\, . \, 10^{-3}\, m)\, \Bigr( \frac{120}{60} \frac{rev/min}{min/s} \Bigr) \\v = \pi (73,22\, . \, 10^{-3}\, m)\, 2 = 0,46 \; m/s } $$
$$ { \\ Pot_{saída} = P_K\; (potência\; na\; engrenagem\; K) \\P_K = P_1.\eta_{rolamento\, eixo\, 1}.\eta_{engrenagem\, eixo\, 1\,e\,2}.\eta_{rolamento\, eixo\, 2}.\eta_{engrenamento\, eixo\, 1\,e\, 2}.\eta_{rolamento\, eixo\, 3} \\P_K = P_1.\eta_{rol}^3.\eta_{engre}^2 = 7,36\, kW. 0.99^3 . 0,97 ^2 \\P_K = 7,36\, kW. 0.99^3 . 0,97 ^2 = 6,72\, kW } $$
$$ { \\F_tang = \frac{P_K}{v_K} = \frac{6,72\, kW}{\pi.73,22 \, . \, 10^{-3} \, . \, \cfrac{120}{60} } \\F_tang = \frac{6,72\, kW}{\pi.73,22 \, . \, 10^{-3} \, . \, 2 } = \frac{6720}{0,46} \\F_tang = \frac{6720}{0,46} = 14.608 \, Newtons \; de\; força } $$
materiais do pinhão e da coroa $${ \\ Tabela \; X\; página \; 106 \begin{cases} \sigma_{flexão \,adm \,1} = \sigma_{flexão \,adm \,2} = \;440 \; N/mm^2 \\ \sigma_{H\, adm\, 1} = \sigma_{H\, adm\, 2} = \;1.920 \; N/mm^2 \end{cases} }$$
Lewis do pinhão (K) $${ \\ \frac{F_t1}{b.m}Y_{F1}.Y_{\epsilon}.Y_s.Y_v \le \frac{\Sigma_{f \, adm \, 1}}{k_f} \\ assumindo \; k_f = 1,5 \\ \frac{14.608N}{b.6} 3,7 \,(1)\,(1,25)\, \,(1,11)\, \le \frac{ 440 \, N/mm^2 }{ 1,5 } \\ b\ge \frac{14.608N}{440.6} 3,7 \,(1)\,(1,25)\, \,(1,11)\, 1,5 \\ b\ge \frac{112.490,73}{2640} = 42,61 \; mm }$$
Lewis na coroa (M) $${ \\ \frac{F_t2}{b.m}Y_{F2}.Y_{\epsilon}.Y_s.Y_v \le \frac{\Sigma_{f \, adm \, 2} }{k_f} \\ assumindo \; k_f = 1,5 \\ \frac{14.608N}{b.6} 2,5 \,(1)\,(1,25)\, \,(1,11)\, \le \frac{ 440 \, N/mm^2 }{ 1,5 } \\ b\ge \frac{14.608N}{440.6} 2,5 \,(1)\,(1,25)\, \,(1,11)\, 1,5 \\ b\ge \frac{76007,25}{2640} = 28,79 \; mm }$$
Hertz, somente calcula para o material mais fraco $${ \\ \frac{F_t2}{b.m}Y_{F2}.Y_{\epsilon}.Y_s.Y_v \le \frac{\Sigma_{f \, adm \, 2} }{k_f} \\ assumindo \; k_f = 1,5 \\ \frac{14.608N}{b.6} 2,5 \,(1)\,(1,25)\, \,(1,11)\, \le \frac{ 440 \, N/mm^2 }{ 1,5 } \\ b\ge \frac{14.608N}{440.6} 2,5 \,(1)\,(1,25)\, \,(1,11)\, 1,5 \\ b\ge \frac{76007,25}{2640} = 28,79 \; mm }$$
変速比 (hensokuhi) relacao de transmissao 補正係数(hosei keisuu) fator de correcao